原文《5G在城郊智慧農(nóng)場多機協(xié)同作業(yè)中的組網(wǎng)研究》發(fā)表在《無線通信》雜志。作者是河南農(nóng)業(yè)大學(xué)信息與管理科學(xué)學(xué)院李勇,席磊,王雯龍,時雷,車銀超,馬新明,中信科移動通信技術(shù)股份有限公司李超。
對單臺農(nóng)機作業(yè)技術(shù)的研究逐漸趨向成熟,鮮有看到對多臺農(nóng)機聯(lián)合作業(yè)通信技術(shù)的研究報道。多臺農(nóng)機作業(yè)過程中通過車載傳感器不斷地采集大量不同種類的數(shù)據(jù)(圖像、視頻等),5G能否滿足這些數(shù)據(jù)對帶寬、時延、速率等傳輸要求以實現(xiàn)機群協(xié)同作業(yè)是值得研究的科學(xué)問題。
本文經(jīng)過細致梳理國內(nèi)外研究現(xiàn)狀與動態(tài)分析,提出無線通信技術(shù)支撐多機協(xié)同作業(yè)是智慧農(nóng)場的關(guān)鍵技術(shù)特征;當前4G、5G在農(nóng)場中的覆蓋范圍與信號強度是否支撐多機協(xié)同作業(yè)值得研究。本文選取河南新鄉(xiāng)國家級某農(nóng)業(yè)科技園區(qū)作為實驗基地,通過設(shè)計實驗,測試參考信號接收功率和信號與干擾加噪聲比指標,采用車載儀器與手持儀表對4G、5G信號覆蓋范圍與強度進行實際測量,并將測量數(shù)據(jù)繪圖進行可視化展示與分析,為智慧農(nóng)場多機協(xié)同作業(yè)如何采用4G、5G混合組網(wǎng)提供科學(xué)依據(jù)與指導(dǎo)。
隨著工業(yè)信息化與城鎮(zhèn)化的持續(xù)推進,我國從事傳統(tǒng)農(nóng)業(yè)生產(chǎn)的勞動力逐漸減少,農(nóng)業(yè)勞動力的老齡化與短缺問題逐漸突顯,成為制約農(nóng)業(yè)發(fā)展的重要因素。未來誰來種地,用什么設(shè)備種地是我國亟需解決的問題,農(nóng)機作業(yè)是重復(fù)而繁重的作業(yè),作業(yè)環(huán)境相對封閉,為無人駕駛農(nóng)機落地提供了天然的條件。隨著國家政策對智慧農(nóng)業(yè)、無人農(nóng)場的需求傾斜,國內(nèi)對無人駕駛的需求不斷增大,各地都在對無人示范農(nóng)場、智慧農(nóng)業(yè)進行搭建,以嘗試和打通無人化農(nóng)業(yè)的進程。發(fā)展以“機器替換人”進行農(nóng)業(yè)生產(chǎn)為主要特征的現(xiàn)代化智慧農(nóng)業(yè)的需求日趨增加[1-2];智慧農(nóng)業(yè)是未來農(nóng)業(yè)的發(fā)展方向,是現(xiàn)代農(nóng)業(yè)的高級形式[3-4]。針對農(nóng)作物種植區(qū)域,實現(xiàn)“耕、種、管、收、運”環(huán)節(jié)的無人化作業(yè)需要使用不同種類的自動駕駛農(nóng)機裝備(拖拉機、收割機、運糧車等),其核心優(yōu)勢表現(xiàn)在提高作業(yè)精度與效率、提升農(nóng)戶操作體驗、降低農(nóng)戶勞動強度與單位面積投入成本等。
單臺無人駕駛拖拉機每日作業(yè)量達到16hm2,行駛速度也能達到12km/h,高精度作業(yè)和全地形適應(yīng)能力使得自動駕駛相對人工駕駛在每日作業(yè)量與行駛速度分別提高約33.3%與50%[5];在紅外、導(dǎo)航定位、毫米波雷達等感知技術(shù)的輔助下,拖拉機即使在夜間無人駕駛的狀態(tài)下也能夠保證作業(yè)效率;自動駕駛農(nóng)機憑借最優(yōu)的路徑規(guī)劃減少不必要的行程,有效降低油耗與環(huán)境污染的同時,還減少對土壤的壓實[6-7]。
農(nóng)機自動駕駛是指農(nóng)機設(shè)備通過自身安裝的各種傳感器與通信設(shè)備獲取車輛周圍環(huán)境信息與自身空間位置,自主按照預(yù)設(shè)行駛路線并主動避讓障礙物以完成作業(yè)的技術(shù)[8]。基于地理空間[敏感詞]位置測量的全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System, GNSS)和中國北斗導(dǎo)航衛(wèi)星系統(tǒng)(BeiDou Navigation Satellite System, BDS)的定位技術(shù)應(yīng)用在農(nóng)機自動駕駛中[9]。
直到1992年,[敏感詞]Trimble開發(fā)RTK系統(tǒng)并將其商業(yè)化應(yīng)用,為GNSS在農(nóng)業(yè)上的應(yīng)用掃除了障礙[10]。中國關(guān)于農(nóng)機自動駕駛技術(shù)的研究始于2004年羅錫文團隊,經(jīng)過十余年的研究,突破了速度線控、主從導(dǎo)航、路徑跟蹤、自動避障等10余項關(guān)鍵技術(shù),研制出了播種機、旋耕機、收割機、插秧機等無人駕駛農(nóng)機,在水田場景自動導(dǎo)航方面居于國際領(lǐng)先水平[11-12];而智能網(wǎng)聯(lián)無人駕駛農(nóng)機技術(shù)在國外暫未有新的技術(shù)突破。
華南農(nóng)業(yè)大學(xué)、上海交通大學(xué)、國家農(nóng)業(yè)信息工程技術(shù)研究中心、上海聯(lián)適導(dǎo)航技術(shù)股份有限公司和濰柴雷沃重工股份有限公司等參與了農(nóng)機導(dǎo)航技術(shù)的研究工作[13-17]。雖然各個國家均高度重視自動或無人駕駛農(nóng)機領(lǐng)域標準化工作,但是,當前國際上還沒有統(tǒng)一的規(guī)范或標準對農(nóng)機自動駕駛程度進行分級,也沒有對自動駕駛農(nóng)機采用的通信協(xié)議標準、故障率、作業(yè)效率、土地利用效率、作業(yè)精度等進行測試評價或統(tǒng)一設(shè)備接口協(xié)議與規(guī)范。
車載通信(Vehicular Communication,VC)吸引著各國學(xué)者與工程師的眼球。車載通信是由各類不同的通信協(xié)議組成,目前各國尚無統(tǒng)一的標準,主流的是以[敏感詞]為代表的專用短距離通信(Dedicated Short Range Communication, DSRC)技術(shù)標準。早在1992年,[敏感詞]材料試驗協(xié)會(ASTM)就已經(jīng)開始針對車載通信制定DSRC技術(shù)草案[18]。DSRC技術(shù)標準在本質(zhì)上是IEEE 802.11a標準在5.9GHz頻譜上的低開銷調(diào)整,因此在IEEE 802.11協(xié)議族中,DSRC被稱為IEEE 802.11p[19],屬于無線局域網(wǎng)技術(shù),后續(xù)針對DSRC的深入研究較少[20]。然而以中國為代表的基于蜂窩通信技術(shù)的LTE-V2X標準已被制定,遺憾的是尚未大規(guī)模運用車載通信技術(shù)來實施與安全相關(guān)的應(yīng)用,還未進入規(guī)模化商業(yè)應(yīng)用階段。與汽車無人駕駛技術(shù)相比,農(nóng)機自動駕駛技術(shù)具有行駛速度低、作業(yè)精度高(±2.5厘米)、成本低以及耐用性強等特點。
綜上,由國內(nèi)外研究現(xiàn)狀及發(fā)展動態(tài)文獻梳理可知,國內(nèi)外應(yīng)用于農(nóng)機群體作業(yè)的無線網(wǎng)絡(luò)通信技術(shù)標準尚未統(tǒng)一,已有研究較少涉及農(nóng)機群體作業(yè)的無線網(wǎng)絡(luò)通信技術(shù)及數(shù)據(jù)傳輸方法[21-23];對單臺農(nóng)機作業(yè)技術(shù)的研究逐漸趨向成熟,鮮有看到對多臺農(nóng)機聯(lián)合作業(yè)網(wǎng)絡(luò)通信技術(shù)的研究報道,也沒有看到采用哪些新的通信技術(shù)的研究報道。
因此,研究無線網(wǎng)絡(luò)的通信技術(shù)與數(shù)據(jù)傳輸方法具有重要的理論意義與應(yīng)用價值。在現(xiàn)代規(guī)模化生產(chǎn)條件下,為了提高作業(yè)效率,需要多臺自動駕駛農(nóng)機裝備協(xié)同作業(yè)[5] [23]。在國家政策的推動下,農(nóng)村土地迅速流轉(zhuǎn)集中;農(nóng)業(yè)生產(chǎn)即將步入信息化、智能化、無人化作業(yè)的新時期,中國智慧農(nóng)業(yè)時代已經(jīng)逐步開啟。
為了實現(xiàn)多臺農(nóng)機協(xié)同作業(yè),農(nóng)機作業(yè)過程中通過車載傳感器不斷地采集大量不同種類的數(shù)據(jù)(視頻、圖像等),并且需要對車輛調(diào)度、媒體訪問、多址接入技術(shù)、數(shù)據(jù)幀傳遞、服務(wù)質(zhì)量(Quality of Service,QoS)等需求進行管理[24-26],這些數(shù)據(jù)對優(yōu)先級、時延、帶寬、QoS等要求均不同;如何達到這些數(shù)據(jù)的特定傳輸要求,以實現(xiàn)機群協(xié)同作業(yè)是值得研究的問題。4G、5G、無線局域網(wǎng)(Wireless Local Area Network,WLAN)近年來發(fā)展迅速并且得到較為廣泛的部署。多臺自動駕駛農(nóng)機裝備是否可以通過4G、5G、WLAN進行相互識別與信息交互尚不清楚。本文針對小麥、玉米輪作多機協(xié)同作業(yè)對通信技術(shù)的實際需求,以解決通信技術(shù)瓶頸性問題為目標,研究如何采用4G、5G、WLAN混合組網(wǎng),為多機協(xié)同作業(yè)提供理論依據(jù)與技術(shù)支撐,對提升我國農(nóng)機裝備通信技術(shù)研發(fā)水平和智慧農(nóng)業(yè)的發(fā)展具有重大價值和現(xiàn)實意義。
02.農(nóng)場實際測量實驗與結(jié)果分析
本研究農(nóng)機群體作業(yè)的無線網(wǎng)絡(luò)通信技術(shù)及數(shù)據(jù)傳輸方法,首先需要明確農(nóng)場環(huán)境無線通信已有硬件條件是否滿足農(nóng)機作業(yè)要求。針對農(nóng)場位置、占地面積、農(nóng)作物植株高度、密集程度、綠化樹木分布、樹木高度、農(nóng)場附近4G、5G基站位置、高度設(shè)計無線測試實驗,模型農(nóng)機移動速度,測試參考信號接收功率(Reference Signal Receiving Power,RSRP)、平均信號與干擾加噪聲比(Signal to Interference plus Noise Ratio,SINR),原陽試驗基地通信環(huán)境測試條件如下:
(1)測試時間:2022年3月19號,9:30~11:50,天氣多云,輕微風(fēng);
(2)測試終端:[敏感詞]p40(11.0.0.990SP11)、自主研發(fā)的酷測軟件(DT_Cool Test 3.0);
(3)測試配速:步行測試平均配速8km/h,乘車測試平均車速30km/h;
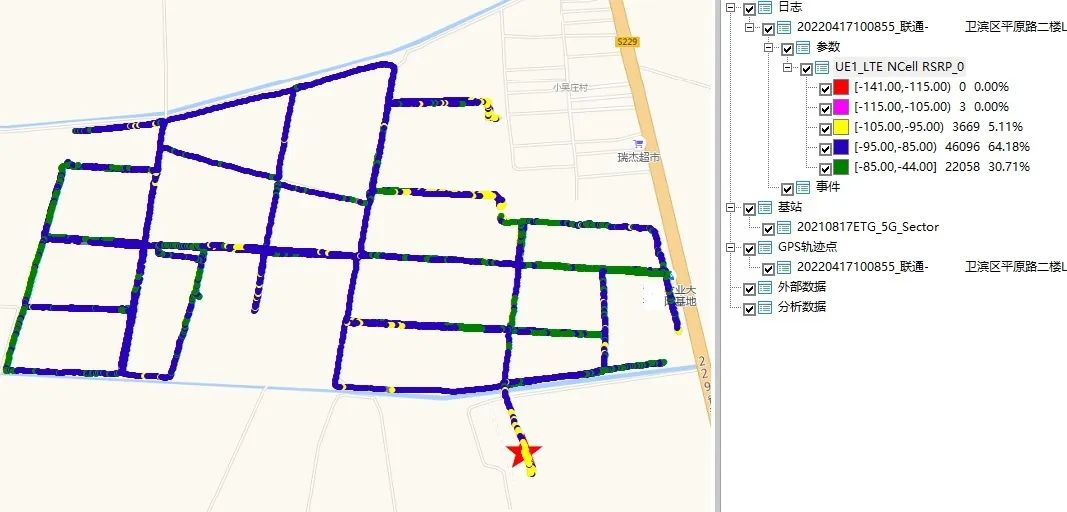
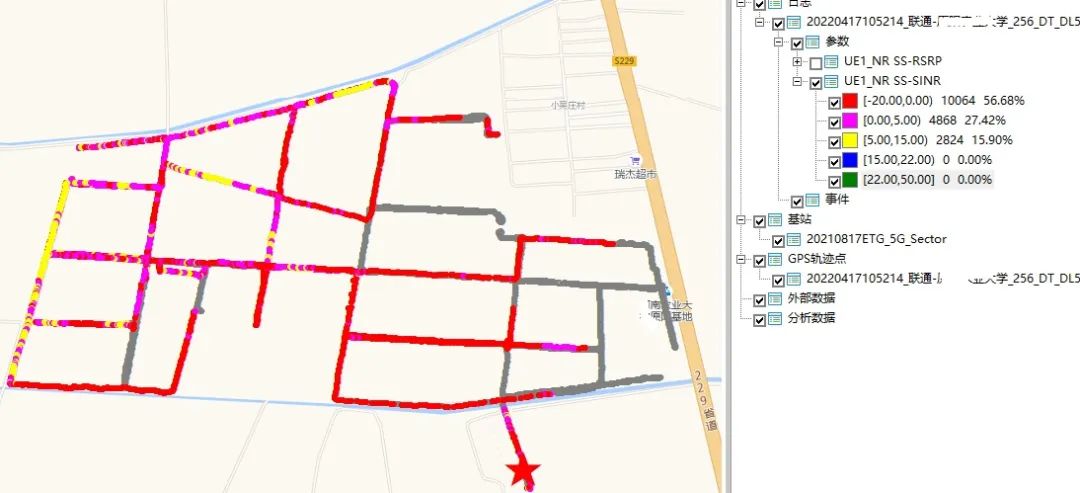
RSRP與SINR是無線信號覆蓋的兩個最基本指標;RSRP是4G網(wǎng)絡(luò)中可以代表無線信號強度的關(guān)鍵參數(shù)以及物理層測量需求之一,是在某個符號內(nèi)承載參考信號的所有資源粒子上接收到的信號功率的平均值;SINR是指接收到的有用信號的強度與接收到的干擾信號(噪聲和干擾)的強度的比值,亦稱為“信噪比”。通過圖1~4可知,農(nóng)場4G信號整體覆蓋率約95.82%,4G平均RSRP -85dbm左右,平均SINR 7db左右。現(xiàn)場測試5G基站距離農(nóng)場約5千米(Km),農(nóng)場5G整體覆蓋率約35.77%,5G平均RSRP -104dbm左右,平均SINR -0.94db左右。
圖1~4測試數(shù)據(jù)表明很有必要研究并設(shè)計適配農(nóng)場的多模態(tài)網(wǎng)絡(luò)與通信模型。針對農(nóng)場無線信號覆蓋環(huán)境,采用4G、5G混合的多模態(tài)網(wǎng)絡(luò)結(jié)構(gòu),農(nóng)機傳感器采集到的數(shù)據(jù)通過4G、5G傳輸?shù)交緜?cè),在基站側(cè)進行匯聚,匯聚后的數(shù)據(jù)經(jīng)過運營商公網(wǎng)傳輸?shù)皆贫诉M行處理,經(jīng)過云端分析之后沿原路反饋給農(nóng)機設(shè)備,農(nóng)機設(shè)備根據(jù)指令執(zhí)行對應(yīng)操作。
03.5G對多機協(xié)同作業(yè)的支撐與指導(dǎo)
小麥、玉米輪作多機協(xié)同作業(yè)在速度方面,輪式農(nóng)機行駛及作業(yè)過程中平均運行速度低于30km/h,在旋耕、犁地等作業(yè)過程中速度低于20km/h,一般輪式農(nóng)機屬于中低速運行;在時延方面,輪式農(nóng)機在中低速行駛場景下對時延要求不太嚴格,日常公網(wǎng)通信環(huán)境下,業(yè)務(wù)要求大數(shù)據(jù)包時延在17ms之內(nèi),小數(shù)據(jù)包時延在15ms之內(nèi),可以滿足輪式農(nóng)機作業(yè)需求;噴撒農(nóng)藥、授粉育種用途的無人機飛行速度高于30km/h,屬于中高速飛行環(huán)境;針對噴撒農(nóng)藥、授粉育種用途的無人機對時延的要求更嚴格,日常公網(wǎng)通信環(huán)境下,業(yè)務(wù)要求大數(shù)據(jù)包時延在17ms之內(nèi),小數(shù)據(jù)包時延在15ms之內(nèi),因此現(xiàn)有公網(wǎng)通信技術(shù)難以滿足無人機作業(yè)要求,根據(jù)無人機作業(yè)路徑,一方面,需要對現(xiàn)有公網(wǎng)5G基站的天線角度進行調(diào)整,增加無人機作業(yè)路徑所在區(qū)域的信號強度;另一方面,增加5G基站部署數(shù)量,擴大5G信號覆蓋范圍。
農(nóng)場4G信號整體覆蓋率約95.82%,4G平均參考信號接收功率(Reference Signal Receiving Power,RSRP)-85dbm左右,平均信號與干擾加噪聲比(Signal to Interference plus Noise Ratio,SINR)7db左右。因此,針對實時性要求較低的中低速輪式農(nóng)機可以采用4G通信模式;由于WLAN中的WIFI-6具有成本低、大帶寬、速率快、非授權(quán)頻段、自組織以及與其他網(wǎng)絡(luò)共存等優(yōu)點,針對田間地頭固定式圖像、視頻傳感器可以采用WIFI-6進行網(wǎng)站部署,實現(xiàn)多傳感器采集到的圖像、視頻傳輸?shù)街行墓?jié)點,中心節(jié)點通過運營商寬帶傳輸?shù)皆贫恕?/span>
通過實驗設(shè)計現(xiàn)場測試5G單個基站距離農(nóng)場約5Km位置,農(nóng)場5G整體覆蓋率約35.77%,5G平均RSRP為-104dbm左右,平均SINR為-0.94db左右。針對農(nóng)場4G、5G無線信號覆蓋情況,應(yīng)采用4G、5G及WLAN中的WIFI-6混合的多模態(tài)網(wǎng)絡(luò)結(jié)構(gòu)。
農(nóng)機車載傳感器采集到的數(shù)據(jù)通過4G傳輸?shù)骄W(wǎng)絡(luò)邊緣側(cè);無人機通過5G覆蓋區(qū)域傳輸?shù)骄W(wǎng)絡(luò)邊緣側(cè);田間地頭固定式圖像、視頻傳感器通過WIFI-6傳輸?shù)骄W(wǎng)絡(luò)邊緣側(cè),在網(wǎng)絡(luò)邊緣側(cè)進行數(shù)據(jù)匯聚,匯聚后的數(shù)據(jù)經(jīng)過運營商公網(wǎng)傳輸?shù)皆贫诉M行處理,經(jīng)過云端分析之后沿原路反饋給農(nóng)機設(shè)備,農(nóng)機設(shè)備根據(jù)指令執(zhí)行對應(yīng)操作,實現(xiàn)多機協(xié)同作業(yè)與多種傳感器所需的通信支撐。
免責聲明:本文采摘自網(wǎng)絡(luò),本文僅代表作者個人觀點,不代表金航標及行業(yè)觀點,只為轉(zhuǎn)載與分享,支持保護知識產(chǎn)權(quán),轉(zhuǎn)載請注明原出處及作者,如有侵權(quán)請聯(lián)系我們刪除。







品通用logo圖 - 副本.jpg)
